

必一体育sport
025-52657056电话:025-52657056
传真:025-52657058
邮箱:info@www.gzjs1688.com
阐述基于激光三角测距法的激光雷达原理
导航的首选方案,本文将对激光雷达核心组件进行介绍并重点阐述基于激光三角测距法的激光雷达原理。
接收器:激光器发射的激光照射到障碍物以后,通过障碍物的反射,反射光线会经由镜头组汇聚到接收器上。
信号处理单元:信号处理单元负责控制激光器的发射,以及接收器收到的信号的处理。根据这些信息计算出目标物体的距离信息。
旋转机构:以上3个组件构成了测量的核心部件。旋转机构负责将上述核心部件以稳定的转速旋转起来,从而实现对所在平面的扫描,并产生实时的平面图信息。
目前激光雷达的测量原理主要有脉冲法、相干法和三角法3种,脉冲法和相干光法对激光雷达的硬件要求高,但测量精度比激光三角法要高得多,故多用于军事领域。而激光三角测距法因其成本低,精度满足大部分商用及民用要求,故得到了广泛关注。
激光三角测距法主要是通过一束激光以一定的入射角度照射被测目标,激光在目标表面发生反射和散射,在另一角度利用透镜对反射激光汇聚成像,光斑成像在CCD(Charge-coupled Device,感光耦合组件)位置传感器上。当被测物体沿激光方向发生移动时,位置传感器上的光斑将产生移动,其位移大小对应被测物体的移动距离,因此可通过算法设计,由光斑位移距离计算出被测物体与基线的距离值。由于入射光和反射光构成一个三角形,对光斑位移的计算运用了几何三角定理,故该测量法被称为激光三角测距法。
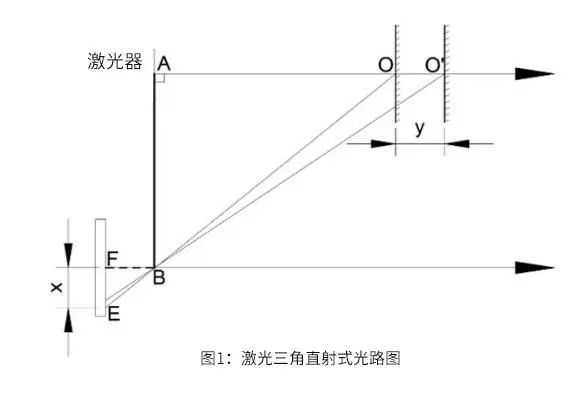
如图1所示,当激光光束垂直入射被测物体表面,即入射光线与被测物体表面法线共线时,为直射式激光三角法。
当光路系统中,激光入射光束与被测物体表面法线°时,该入射方式即为斜射式。如图2所示的光路图为激光三角法斜射式光路图。
由激光器发射的激光与物体表面法线成一定角度入射到被测物体表面,反(散)射光经B处的透镜汇聚成像,最后被光敏单元采集。
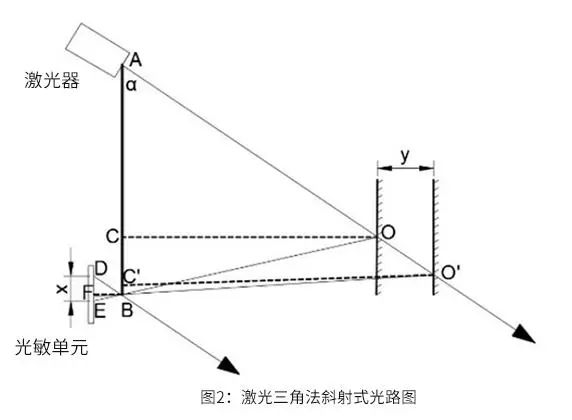
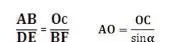
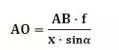
由图2可知入射光AO与基线AB的夹角为α,AB为激光器中心与CCD中心的距离,BF为透镜的焦距f,D为被测物体距离基线无穷远处时反射光线在光敏单元上成像的极限位置。DE为光斑在光敏单元上偏离极限位置的位移,记为x。当系统的光路确定后,α、AB与f均为已知参数。由光路图中的几何关系可知△ABO∽△DEB,则有边长关系:
在确定系统的光路时,可将CCD位置传感器的一个轴与基线AB平行(假设为y轴),则由通过算法得到的激光光点像素坐标为(Px,Py)可得到x的值为:

其中CellSize是光敏单元上单个像素的尺寸,DeviationValue是通过像素点计算的投影距离和实际投影距离x的偏差量。当被测物体与基线AB产生相对位移时,x改变为x,由以上条件可得被测物体运动距离y为:
无论是直射式还是斜射式激光三角测距法,均可实现对被测物体的高精度、非接触测量,但直射式分辨率没有斜射式高。
的时间差,然而我们都知道光速具有不变性,再将时间差乘以光速就可以得到目标物体的距离。2.还有另一种全新的测量方法——
。像我们能听到的connect的体感摄像头,还有Intel研发的RealSense都会使用到
表现出色。 除了深色物体检出能力外,实际工作环境也会受到各类环境光照的影响。从落地窗投射进来的阳光、各类室内的人造光源甚至是直接暴露在室外工作,这些情况都有可能对于
环境光照的影响。从落地窗投射进来的阳光、各类室内的人造光源甚至是直接暴露在室外工作,这些情况都有可能对于
传感器RPLIDAR定位建图 但其实,除了可以应用在机器人定位建图、自主导航、障碍物检测与规
或者TOF成像原理对机器人进行定位,帮助机器人构建所在环境的高精度轮廓信息,辅助机器人。通过观察这对CP
等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,
、脉冲测量必配芯片MS1003产品简述MS1003是一款高精度时间测量(TDC)电路,对比MS1002具有更高的精度和更小的封装,适合于高精度小封装的应用领域。MS1003具有
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗
原理 /
【米尔-全志T113-i开发板试用】发布opencv-mobile米尔t113i专享预编译包

